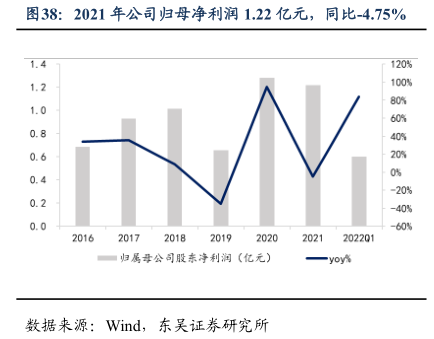
图表内容
图10:伺服电机输出与本体需求不匹配,需要减速器进行减速增距
输出转速
20~50+rps
需求转速
0.43≈1.50-rps
输出扭矩
6≈20-Nm
需求转矩
500+Nm
数据来源:埃斯顿官网,东吴证券研究所

研究报告节选:
精密减速器是机器人生产过程中技术壁垒最高的零部件。机器人每个关节运动均需靠伺服电机驱动,伺服电机具有输出转速大、输出扭矩小的特点;而关节结构实际上的需求是输出转速小、转动扭矩大,所以现有伺服电机的输出不能满足终端机械本体的运动需求,就需要减速器这一结构进行减速增距。