图表内容
6:从现有产品来看,FOV和VD的扩大不可避免的带来模组体积的增加
参数
奔驰S级
红旗EHS-9
大众ID3/4
吉利星越
WEY摩卡
广汽GS8
北京魔方
飞凡R7
10*5
8*3
9*4/7*1
9*2.3
约10
10*4
10*4
13*5
ID (m)
7.5
10/3
PGU
DLP
TFT
TFT
TFT
TFT
DLP
DLP
LCOS
本积(L)
25+
14+
6.4
料来源:锐思华创官网、疆程官网、飞凡汽车官网、
开源证券研究所

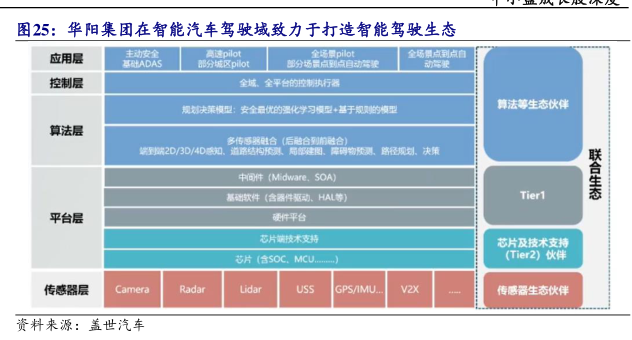
研究报告节选:
中小盘成长股深度 在不增加模组体积的情况下,尽可能的提升 FOV(视场角)和 VID(成像距离)是当前 HUD 追求的核心目标。FOV 和 VID 决定了 HUD 的成像面积,而成像面积的大小定义了 HUD 的功能。随着 HUD 产品视野从覆盖单车道提升至三车道,同时结合多种 ADAS 信息,乃至未来显示一些娱乐信息,厂商对 HUD 的成像面积的需求不断增加。但因目前 HUD 多采用多级反射的方式成像,大的 FOV 要求反射镜的尺寸足够大,导致 HUD 的体积随着成像面积的扩大而同步增加,奔驰 S 级为例,在实现 10°*5°FOV、8 米 VID 的情况下,模组的体积达到 25 升以上,这是普通车型难以接受的。目前厂商致力于通过各类精巧的光学设计来减小 AR-HUD 模组占用的空间,但要有根本性的改变,需要在光学技术上采用全新的技术体系,全息光波导技术走上台前。全息光波导技术相比于反射式 HUD 技术,只需增加光机投影表面积,大幅减少立体体积,能有效避免 HUD 体积过大的问题。