图表内容
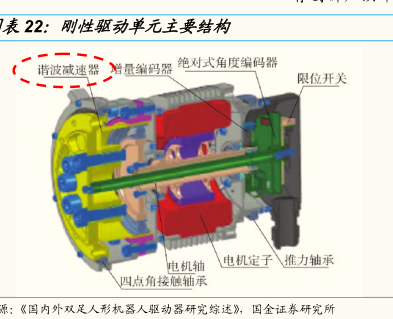
表22:刚性驱动单元主要结构
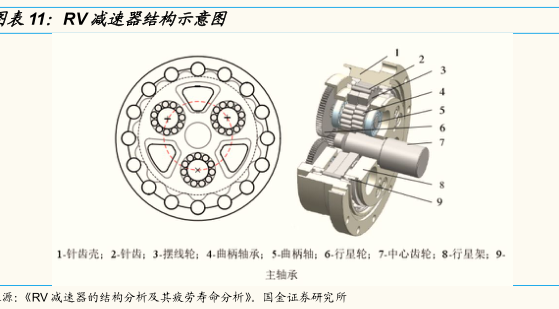
(谐波减速器游量编码器
绝对式角度编码器
限位开关
电机轴
电机定子\推力轴承
四点角接触轴承
源:《国内外双足人形机器人驱动器研究综述》,
国金证券研究所
研究报告节选:
准直驱驱动单元多采用精密行星减速器。准直驱驱动器依靠驱动器电机开环力控,不依赖于附加力和力矩传感器,就可以本体感知机器人外界的交互。其驱动单元最理想的是采用电机直接驱动,但受限于当前电机工艺和技术,电机直驱驱动器的扭矩密度不能满足机器人应用需求,因此目前折中采用电机加低传动比行星减速器方案。当下该种驱动单元已应用在四足机器人或小型双足机器人中。