图表内容
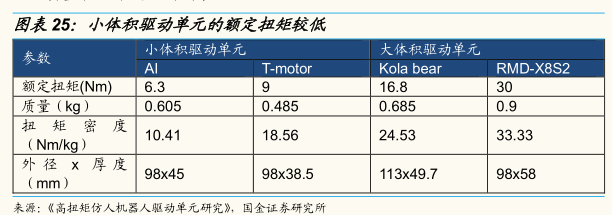
图表25:小体积驱动单元的额定扭矩较低
参数
小体积驱动单元
大体积驱动单元
T-motor
Kola bear
RMD-X8S2
额定扭矩(Nm)
6.3
16.8
质量(kg)
0.605
0.485
0.685
0.9
扭矩密度
10.41
18.56
24.53
33.33
Nm/kg
98x45
98x38.5
113x49.7
98x58
(mm)
来源:《高扭矩仿人机器人驱动单元研究》,国金证券研究所
研究报告节选:
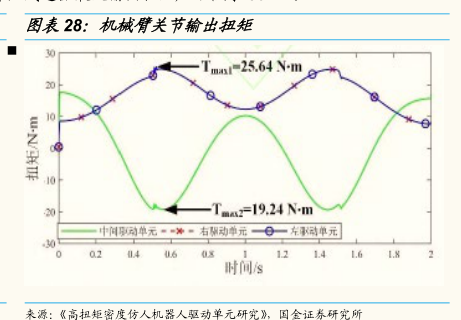
图表25:小体积驱动单元的额定扭矩较低 参数 额定扭矩(Nm) 质量(kg) 扭 矩 密 度(Nm/kg) 外 径 x 厚 度(mm) 来源:《高扭矩仿人机器人驱动单元研究》,国金证券研究所 我们尝试通过分析人形机器人在运动或者负载过程中其对关节扭矩密度的要求进行筛选。结合 Tesla Bot 公布的参数要求(身高 1.72m,重量 57kg,负载 20kg,行走速度 8km/h),通过汇总当下国内针对仿人机器人的研究,找到参数相仿的机械手臂关节以及双足关节进行分析,可进一步挑选可应用在人形机器人关节中的减速器。