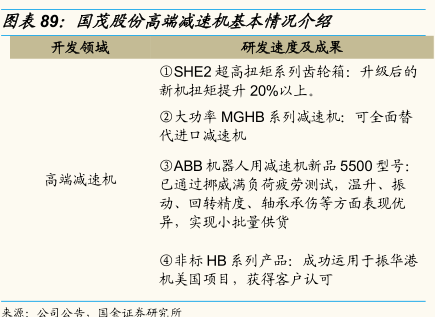
图表内容
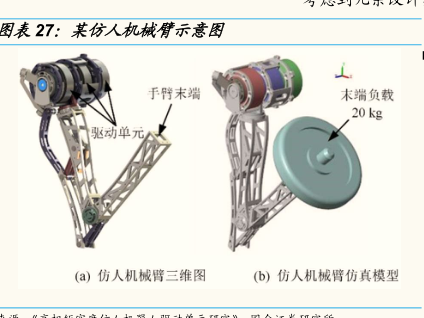
图表27:某仿人机械臂示意图
末端负载
20 kg
驱动单元
(a)仿人机械臂三维图
(b)仿人机械臂仿真模型
研究报告节选:
人形机器人腿部结构和运动体系复杂,需要设计多个自由度,因此对减速器数量和性能要求更大。人形机器人是一个非常复杂的运动体系,需要做到平衡和灵活运动,因此在其腿部结构设计上的运动平衡和控制尤为重要。根据 Tesla Bot 公布信息,其腿部一共配有 12 个自由度,结合相关文献显示,广东工业大学团队设计的一款机器人中其腿部也包含 12 个自由度,分别为髋关节 3 个自由度,包含偏航、翻转、俯仰关节;膝关节 1 个自由度,包含一个俯仰关节;踝关节 2 个自由度,包含俯仰、翻转关节。